Jin Cheng

Hello there!
I’m a doctoral student in Computer Science at ![]() ETH Zürich, Switzerland 🇨🇭, affiliated with Computational Robotics Lab, advised by
ETH Zürich, Switzerland 🇨🇭, affiliated with Computational Robotics Lab, advised by ![]() Prof. Stelian Coros and
Prof. Stelian Coros and ![]() Prof. Guanya Shi.
Prof. Guanya Shi.
Prior to this, I received my master’s degree in mechanical engineering at ![]() ETH Zürich and my bachelor’s degree in vehicle engineering at
ETH Zürich and my bachelor’s degree in vehicle engineering at ![]() Tsinghua University.
Tsinghua University.
- research
My research interest lies in empowering mobile robots with the ability of locomotion and manipulation through reinforcement learning. I mainly focus on legged systems such as quadrupeds 🐕🐈, humanoids 🏃🏻💃🏻.
- misc.
Other than professional bios, I am from Chongqing, southwest of China. I am extremely fond of Chongqing hot pot.
Besides, I love to read and spend a lot of time with books, especially in modern and contemporary literature. My favorite authors are Haruki Murakami, Natsume Soseki, Albert Camus and Gabriel García Márquez.
I also enjoy photography 📷, video games 🎮, and movies 🍿. In my free time, I make latte arts ☕️, play tennis 🎾, and snowboard 🏂.
news
| Jun 17, 2026 | 📑 I am happy to share my collaboration work with Multi-Agent Robotic Motion Laboratory at National University of Singapore, APEX: Action Priors Enable Efficient Exploration for Robust Motion Tracking on Legged Robots has been accepted for publication in the Proceedings of 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026). |
|---|---|
| May 17, 2026 | 🇦🇹 I spent a wonderful week at the 2026 International Conference on Robotics and Automation (ICRA 2026) in Vienna, Austria. |
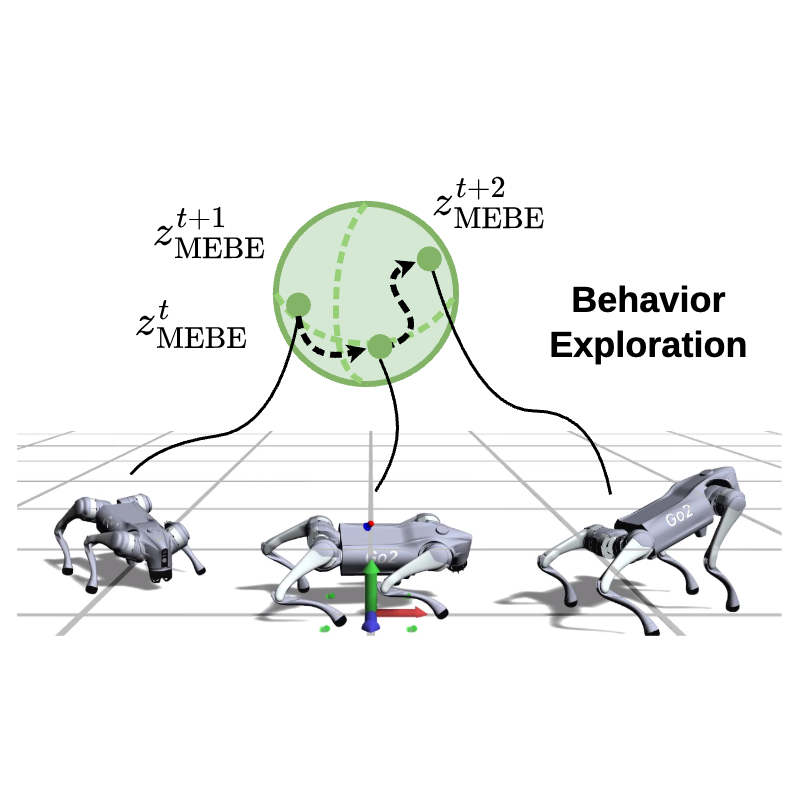
| May 05, 2026 | 📑 I am happy to share our work Maximum Entropy Behavior Exploration for Sim2Real Zero-Shot Reinforcement Learning from Computational Robotics Lab has been accepted for publication in Reinforcement Learning Conference (RLC 2026). Please check the project website for more details. |
| Jan 31, 2026 | 📑 I am happy to share our work from Computational Robotics Lab, CAIMAN: Causal Action Influence Detection for Sample Efficient Loco-Manipulation has been accepted for publication in the Proceedings of 2026 IEEE International Conference on Robotics and Automation (ICRA 2026). |
| Nov 05, 2025 | 📑 I am delighted to share our recent work from Computational Robotics Lab, Whole-body Inverse Dynamics MPC for Legged Loco-manipulation has been accepted for publication to the IEEE Robotics and Automation Letters (RA-L) Special Issue on Advancements in MPC and Learning Algorithms for Legged Robots. |
| Oct 26, 2025 | 🇨🇳 I spent a wonderful week at the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) in Hangzhou, China. |
| Oct 03, 2025 | 🇰🇷 I spent a wonderful week at the 2025 IEEE RAS 24th International Conference on Humanoid Robots (Humanoids) in Seoul, South Korea. |
| Oct 02, 2025 | 🇰🇷 I spent a wonderful week at the 2025 Conference on Robot Learning (CoRL 2025) in Seoul, South Korea. |
| Jul 22, 2025 | 📑 I am delighted to share my recent work from Computational Robotics Lab, RAMBO: RL-augmented Model-based Whole-body Control for Loco-manipulation has been accepted for publication to the IEEE Robotics and Automation Letters (RA-L) journal. Please check our website for more details. |
| Jul 11, 2025 | 📑 I am very delighted to share my collaboration work with Robot Intelligence Lab (RILAB) at Korea University, Spatio-Temporal Motion Retargeting for Quadruped Robots, has been accepted for publication in IEEE Transactions on Robotics (T-RO). |
| Apr 11, 2025 | 📑 I am happy to share my collaboration work with Multi-Agent Robotic Motion Laboratory at National University of Singapore, SATA: Safe and Adaptive Torque-Based Locomotion Policies Inspired by Animal Learning has been accepted for publication in the Proceedings of Robotics: Science and Systems (RSS 2025). |
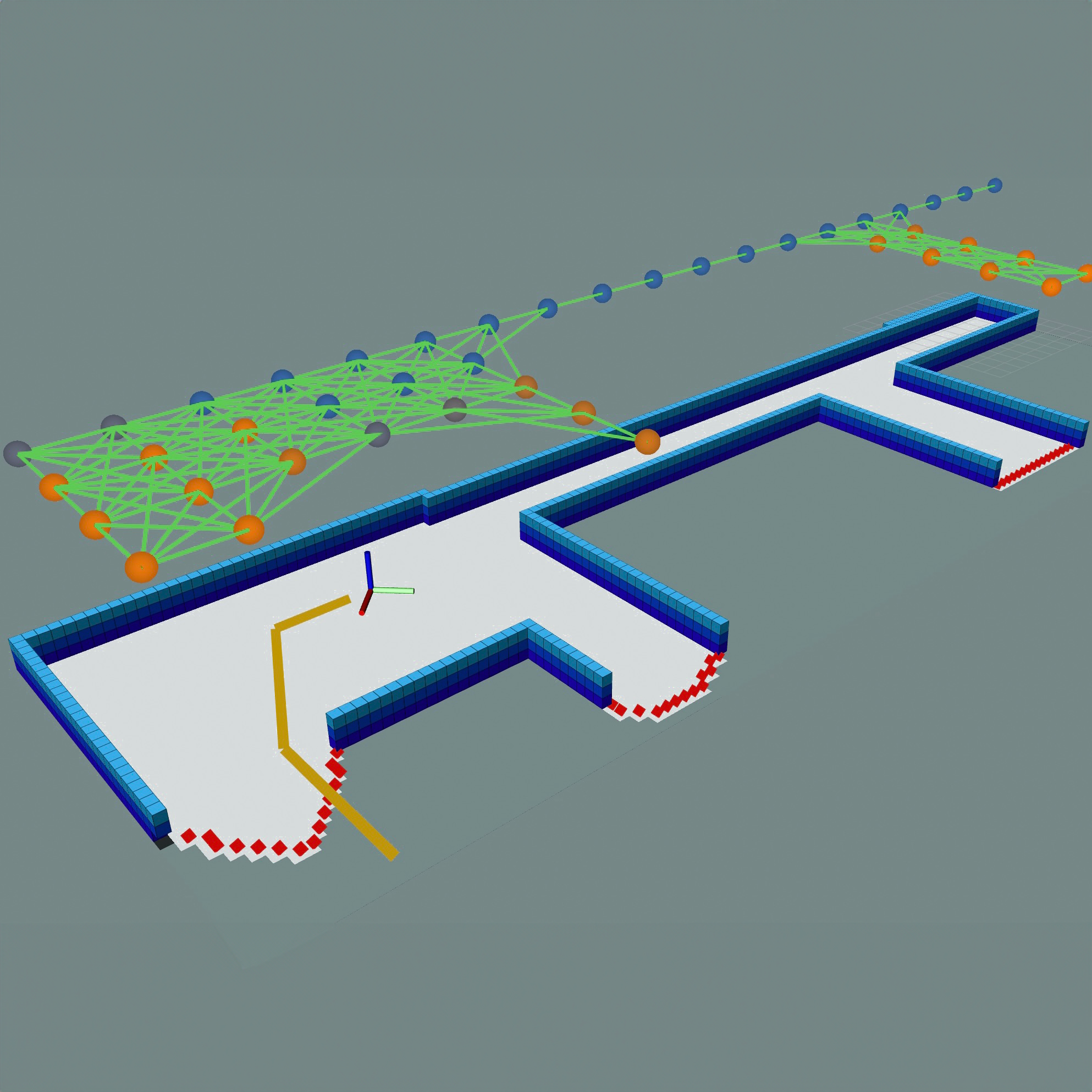
| Jan 28, 2025 | 📑 I am happy to share my collaboration work with Multi-Agent Robotic Motion Laboratory at National University of Singapore, DARE: Diffusion Policy for Autonomous Robot Exploration has been accepted for publication in the Proceedings of 2025 IEEE International Conference on Robotics and Automation (ICRA 2025). |
| Nov 24, 2024 | 🇫🇷 I spent a wonderful week at the 2024 IEEE RAS 23rd International Conference on Humanoid Robots (Humanoids) in Nancy, France. |
| Nov 11, 2024 | 🇩🇪 I spent a wonderful week at the 2024 Conference on Robot Learning (CoRL 2024) in Munich, Germany. |
| Sep 04, 2024 | 📑 I am happy to share our recent work from Computational Robotics Lab, RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards has been accepted for publication on 2024 Conference on Robot Learning (CoRL 2024). Please check our website for more details. |
| May 17, 2024 | 🇯🇵 I spent a wonderful week at the 2024 International Conference on Robotics and Automation (ICRA 2024) in Yokohama, Japan. |
| May 15, 2024 | 📑 I am happy to share our recent work Offline Diversity Maximization Under Imitation Constraints from Autonomous Learning group at Max Planck Institute for Intelligent Systems (MPI-IS) has been accepted for publication on the first Reinforcement Learning Conference (RLC 2024). Please check the project website for more details. |
| Jan 29, 2024 | 📑 I am happy to share our recent work from Autonomous Learning group at Max Planck Institute for Intelligent Systems (MPI-IS), Learning Diverse Skills for Local Navigation under Multi-constraint Optimality accepted for publication in the Proceedings of 2024 IEEE International Conference on Robotics and Automation (ICRA 2024). Please check the project website for more details. |
| Nov 10, 2023 | 🇺🇸 I spent a wonderful week at the 2023 Conference on Robot Learning (CoRL 2023) in Atlanta, United States. |
| Oct 01, 2023 | 🏫 I started my doctoral journey in Computer Science at ETH Zürich, Switzerland. |
| Aug 23, 2023 | 📑 I am happy to share our recent work from Computational Robotics Lab, RL + Model-based Control: Using On-demand Optimal Control to Learn Versatile Legged Locomotion has been published to the IEEE Robotics and Automation Letters (RA-L) journal. Please check the project website for more details. |
| Jul 31, 2023 | 🎓 I received my master degree in mechanical engineering from ETH Zürich, Switzerland. |
| Jun 03, 2023 | 🇬🇧 I spent a wonderful week at the 2023 International Conference on Robotics and Automation (ICRA 2023) in London, United Kingdom. |
| Apr 01, 2023 | 🇩🇪 I started to work as a research intern in Autonomous Learning group at Max Planck Institute for Intelligent Systems (MPI-IS), Tübingen, Germany, under the supervision of Prof. Dr. Georg Martius. I will be working on reinforcement learning with unsupervised skill discovery for quadruped robots. |
| Nov 05, 2022 | 🇨🇭 I started to work as a research assistant in Computational Robotics Lab at ETH Zürich under the supervision of Prof. Dr. Stelian Coros. I will be working on imitation learning for quadruped robots. |
| Oct 29, 2022 | 🇯🇵 I spent a wonderful week at the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022) in Kyoto, Japan. |
| Oct 03, 2022 | 📋 I successfully defended my master thesis in Robotic Systems Lab under the supervision of Alexander Reske, Nikita Rudin, Fabian Jenelten, Dr. Farbod Farshidian, Prof. Dr. Marco Hutter. I worked on imitating model predictive controller using reinforcement learning for perceptive locomotion for ANYmal. |
| Aug 15, 2022 | 📝 I started to work as head teaching assistant for Dynamic Programming and Optimal Control in HS22 from Prof. Dr. Raffaello D’Andrea at ETH Zürich. |
| Jun 30, 2022 | 📑 I am happy to announce that our recent work from Robotic Systems Lab, Haptic Teleoperation of High-dimensional Robotic Systems Using a Feedback MPC Framework has been accepted for publication in the Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), which will be held on October 23-27, 2022, Kyoto, Japan. |
| Mar 10, 2022 | 🎉 I was awarded Outstanding Teaching Assistant Award from Department of Mechanical and Process Engineering (D-MAVT), ETH Zürich, check website, post. |
| Feb 15, 2022 | 📝 I started to work as a student teaching assistant for Recursive Estimation in FS22 from Prof. Dr. Raffaello D’Andrea at ETH Zürich. |
| Jan 21, 2022 | 📋 I successfully finished my semester project in Robotic Systems Lab under the supervision of Dr. Firas Abi-Farraj, Dr. Farbod Farshidian, Prof. Dr. Marco Hutter. I worked on improving teleoperation performance using model predictive control for ALMA. |
| Aug 15, 2021 | 📝 I started to work as a student teaching assistant for Dynamic Programming and Optimal Control in HS21 from Prof. Dr. Raffaello D’Andrea at ETH Zürich. |
| Jul 09, 2021 | ⛰️ I spent a wonderful week at ETH Robotics Summer School in Wangen an der Aare. A broad scope of components of autonomous mobile robots including state estimation, trajectory optimization, environment mapping, and artifact detection were introduced and implemented on a wheeled platform, SuperMegaBot. |
| Aug 14, 2020 | 🏫 I started my master program in mechanical engineering at ETH Zürich, Switzerland. |
| Jul 15, 2020 | 🎓 I received my bachelor degree in vehicle engineering from School of Vehicle and Mobility, Tsinghua University, Beijing, China. |
| Oct 10, 2019 | 🎉 I was awarded Academic Excellence Scholarship again;) and Friends of Tsinghua Scholarship – German Scholarship from Tsinghua University. |
| Mar 10, 2019 | 🇩🇪 I spent three wonderful weeks at RWTH AACHEN University Winter School in Aachen, Germany. |
| Oct 10, 2018 | 🎉 I was awarded Academic Excellence Scholarship and Volunteer Public Service Scholarship from Tsinghua University. |
| Oct 10, 2017 | 🎉 I was awarded Integrated Excellence Scholarship from Tsinghua University. |
| Aug 15, 2016 | 🏫 I started my bachelor in vehicle engineering at Department of Automotive Engineering, Tsinghua University, Beijing, China. |